Данное ПО было написано на
Grip.
Исходников у меня - нет.
Но, давайте попытаемся восстановить хотя бы,
частично. Для меня - это была Разминка для ума. Восстанавливал
программу я параллельно с её созданием. :) Слушая вопли и всякие
глупости эээ ходивших мимо граждан.
Оговорюсь.
Grip - не люблю. Но почему - то, он
используется в Unigraphic-e , причем иногда
очень глубоко.
Первое мое знакомство с ним в 2001 году, было плачевным :):)
Я сделал программу. Компилирую. Ошибок - нет. Не
работает, блин... Стал смотреть глубже компилируемую информацию, и тут
меня осенило.... блин..
ИМЕНА ПЕРЕМЕННЫХ:
В GRIP-е
- ИХ МАКСИМАЛЬНАЯ ДЛИНА = 6 символов.
Описывать алгоритм я буду на основе симбиоза
С и Grip.
Излишние употребление Меток, вас , только
запутает.
Сразу предупреждаю, что полностью алгоритм я не восстанавливал - мне было
ПРОСТО ЛЕНЬ. Но, восстановленная часть прекрасно работала.
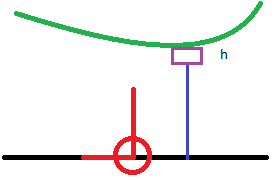
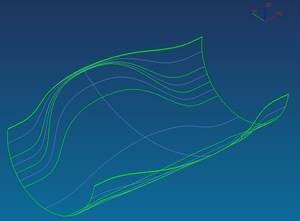
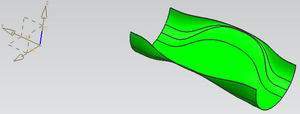
Самая простейшая
программа состояла в виде показанном ниже:
Схему её работы просто отражает рисунок:
$$-------------Переменные-----------------
entity/srf0(100),srf1(100)
entity/pt0, ln0, prj
number/u,v,x,y
number/coord(3), vec(3)
number/h
number/x0,y0,dx,dy,
number/num
number/i,ix,iy
number/nx,ny
number/zH(43,8)
number/norma(43,8,3)
number/s,r,c
string/str(132)
$$ -------------Константы-----------------
h = 19.05
x0 = 122
y0 = -1200
dx = 250
dy = 400
nx = 42
ny = 7
vec(1)=0
vec(2)=0
vec(3)=1
$$ ----------Выбор поверхности-----------
step1:
mask/71
IDENT/'Выберите поверхность',srf0,CNT,num,CURSOR,X,Y,Z,RSP
IFTHEN/(rsp==1) or (rsp==2)
JUMP/halt:
ENDIF
$$----Сдвигаем поверхности на величину h---
step2:
i = 1
LFOR1:
IFTHEN/i<=num
srf1(i) = OFFSRF/srf0(i),h
i=i+1
JUMP/LFOR1:
ENDIF
$$----Находим точки пересечения ног ---
$$----со сдвинутой поверх---
step3:
i = 1
LFOR2:
IFTHEN/i<=num
ix=1
iy=1
LFOR3:
IFTHEN/ix<=nx
LFOR4:
IFTHEN/iy<=ny
x=(ix*dx-dx)+x0
y=(iy*dy-dy)+y0
$$ способ 1-ый
$$ проецируем точку на поверхность по вектору
pt0 = POINT/x,y,0
prj = PROJ/pt0,ON,srf1(i),VECT,vec
IFTHEN/(prj == &NULENT)
JUMP/LABERR:
ENDIF
$$ способ 2-ой - не учитывает отв.
$$ Находим точки пересечения (мах=2 м )
$$ со сдвинутой поверх
$$ pt0 = POINT/0,0,0
$$ ln0 = LINE/x,y,0,x,y,2000
$$ prj = POINT/pt0,INTOF,ln0,srf1(i),IFERR,LABERR:
coord = &point(prj)
zH(ix,iy)=coord(3)
$$ Вычисляем U V - нужно для построения
SPARF/srf1(i),prj,u,v
$$ Формируем массив нормалей
norma(ix,iy,1..3) = SNORF(srf1(i),u,v)
DELETE/prj
JUMP/JUMPDL:
LABERR:
print/' Точек пересечения нет'
JUMPDL:
DELETE/pt0, ln0 , prj
iy = iy + 1
JUMP/LFOR4:
ENDIF
iy=1
ix=ix+1
JUMP/LFOR3:
ENDIF
i = i + 1
JUMP/LFOR2:
ENDIF
$$----Вывод ног и программы----
step45:
&FTYPE=&DECIM
&DDECPL=4
&DECPT=&PERIOD
&SUPRES=&NO
print/'DEFINE_PRG ' + &pname
ix=1
LFOR5:
IFTHEN/ix<=nx
iy=1
LFOR6:
IFTHEN/iy<=ny
IFTHEN/zH(ix,iy)==0
JUMP/LEND6:
ENDIF
x=(ix*dx-dx)+x0
y=(iy*dy-dy)+y0
$$----Вывод ног-(построение геом обьектов)
ln0 = SOLCYL/ORIGIN,x,y,0,HEIGHT,zH(ix,iy),DIAMTR,100
ln0 = SOLCYL/ORIGIN,x,y,zH(ix,iy),HEIGHT,h, $
DIAMTR,200,AXIS,-norma(ix,iy,1..3)
&COLOR(ln0) = &GREEN
$$---- и Вывод информации
s = INTF((ix-0.5)/6)+1
r = iy
c = (ix-(INTF(ix/6))*6)
IFTHEN/ c==0
c=6
ENDIF
str='MOVE '+'S'+ISTR(s)+' R'+ISTR(r)+' C'+ $
ISTR(c)+' '+DFSTR(zH(ix,iy)+h)
print/str
LEND6:
iy = iy + 1
JUMP/LFOR6:
ENDIF
ix = ix + 1
JUMP/LFOR5:
ENDIF
print/'END_DEFINE_PRG'
$$----Конец программы-----------
halt:
HALT
Ниже , вышеприведенный алгоритм мы
слегка усложним.
 Комментарий: Комментарий:
Я пропустил решение с поворотными приспособлениями R=76.2 R=152.4 -
просто надоело. Там тоже рутина, никаких ноу-хау.
И пропустил анализ на сплайны - то-есть, когда границы поверхности -
сплайны ( у них была с этим какая-то загвоздка ) . Я
просто понял - слышал
 :), что решение этой задачи состояло у человека в ином методе
нахождения пересечения тел: :), что решение этой задачи состояло у человека в ином методе
нахождения пересечения тел: $$ -------- Анализ краев - для каждой стороны поверхности - 4 шт-----
pt0 = POINT/x,y,0
cr0 = CIRCLE/CENTER,pt0,RADIUS,diam/2
....
prj1 = PROJ/cr0,ON,srf0(i),VECT,vec
....
Алгоритм:
$$ -------------Переменные-----------------
$$ -------------Константы-----------------
step0:
dtname = SUBSTR(&PNAME,7,4)+'_'+SUBSTR(&PNAME,12,3)
h = 19.05
h2 = 67.31
diam = 80.264
diam1 = 30
diam2 = 20
x0 = 122
y0 = -1200
dx = 250
dy = 400
nx = 42
ny = 7
vec(1)=0
vec(2)=0
vec(3)=1
roff1 = 76.2 $$ Смещение от центра до присоски
roff2 = 152.4
hoff = 118.87
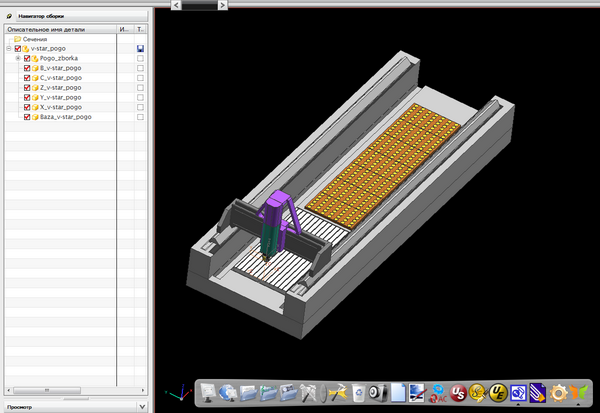
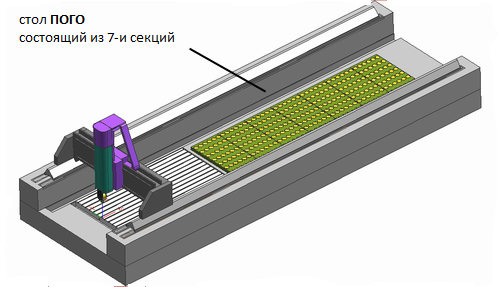
$$----Выбор стола ПОГО-----------
step1:
mask/63
IDENT/'Выберите стол POGO',pogo,CNT,npogo,CURSOR,X,Y,Z,rsp
IFTHEN/(rsp==1) or (rsp==2)
JUMP/halt:
ENDIF
$$----Система координат-----------
step2:
wcs_sv = &WCS
xaxs = &XAXIS(pogo)
yaxs = &YAXIS(pogo)
wcsofs=&ORIGIN(pogo)
pt1=POINT/wcsofs
wcsofs(1)=wcsofs(1)+xaxs(1)
wcsofs(2)=wcsofs(2)+xaxs(2)
wcsofs(3)=wcsofs(3)+xaxs(3)
pt2=POINT/wcsofs
wcsofs(1)=wcsofs(1)+yaxs(1)
wcsofs(2)=wcsofs(2)+yaxs(2)
wcsofs(3)=wcsofs(3)+yaxs(3)
pt3=POINT/wcsofs
&WCS = CSYS/pt1,pt2,pt3
DELETE/ pt1, pt2, pt3
$$----Выбор поверхности-----------
step3:
mask/71
IDENT/'Выберите поверхность (LINKED)',srf0,CNT,NUM,CURSOR,X,Y,Z,RSP
IFTHEN/(RSP == 1) or (RSP==2)
JUMP/ret:
ENDIF
$$----Находим точки пересечения ног ---
$$----со сдвинутой поверх---
step4:
$$-переменная была введена для реверса - если технолог (я)
$$ выбирал поверхность иначе )) вообще эээ сделано не правильно
$$ но я предположил, что этот человек сделает примерно так.
dir = 1
DIRREV:
$$ Создаем эквидистантную поверхность - отодвигаем на h
i = 1
step41:
IFTHEN/i<=NUM
srf0of(i) = OFFSRF/srf0(i),h*dir
i=i+1
JUMP/step41:
ENDIF
i = 1
step42:
IFTHEN/i<=NUM
ix=1
step43:
iy=1
IFTHEN/ix<=nx
step44:
IFTHEN/iy<=ny
x=(ix*dx-dx)+x0
y=(iy*dy-dy)+y0
srf1 = srf0of(i)
srf2 = srf0(i)
ln0 = POINT/x,y,0
prj1 = PROJ/ln0,ON,srf1,VECT,vec
prj2 = PROJ/ln0,ON,srf2,VECT,vec
IFTHEN/(prj1 == &NULENT) OR (prj2 == &NULENT)
JUMP/JUMPDL:
ENDIF
coord1 = &point(prj1)
coord2 = &point(prj2)
dz = coord1(3)-coord2(3)
IFTHEN/(dz<0)
dir = -1
DELETE/ ln0, prj1, prj2
JUMP/DIRREV:
ENDIF
zH(ix,iy)=coord1(3) + h
$$ Сохраним массив координат
coordpts(ix,iy,1..3) = coord1(1..3)
$$ Вычисляем U V - нужно для построения
SPARF/srf1,prj1,u,v
$$ Формируем массив нормалей
norma(ix,iy,1..3) = SNORF(srf1,u,v)
JUMPDL:
DELETE/ ln0, prj1 , prj2
iy=iy+1
JUMP/step44:
ENDIF
ix=ix+1
JUMP/step43:
ENDIF
i = i + 1
JUMP/step42:
ENDIF
$$ Удаляем эквидистантную поверхность
i = 1
step45:
IFTHEN/i<=NUM
DELETE/srf0of(i)
i=i+1
JUMP/step45:
ENDIF
$$ ----высоту приспособления-1-----
step6:
mask/63
IDENT/'Выберите приспособление FIXED',fix,CNT,nfix,CURSOR,X,Y,Z,RSP
IFTHEN/(RSP == 1) or (RSP == 2)
JUMP/step7:
ENDIF
coord2 = &ORIGIN(fix)
x = coord2(1)
y = coord2(2)
$$ решаем обратную задачу
$$ x=(ix*dx-dx)+x0
$$ y=(iy*dy-dy)+y0
ix = (x-x0+dx)/dx
iy = (y-y0+dy)/dy
nfixx1 = INTF(ix - 1)
nfixx2 = INTF(ix)
coord = &XAXIS(fix)
IFTHEN/coord(1)>0
nfixx1 = INTF(ix)
nfixx2 = INTF(ix + 1)
ENDIF
nfixy = INTF(iy)
IFTHEN/(nfixx1<0) OR (nfixx2<0) OR (nfixy<0) OR $
(nfixx1>nx) OR (nfixx2>nx) OR (nfixy>ny)
MESSG/'Приспособление за пределами стола !'
JUMP/step7:
ENDIF
zH(nfixx1,nfixy) = coord2(3)
zH(nfixx2,nfixy) = coord2(3)
$$ ----высоту приспособления-2-SLIDER----
step7:
mask/63
IDENT/'Выберите приспособление SLIDER',sld,CNT,nsld,CURSOR,X,Y,Z,RSP
IFTHEN/(RSP == 1) or (RSP == 2)
JUMP/step5:
ENDIF
coord2 = &ORIGIN(sld)
x = coord2(1)
y = coord2(2)
ix = (x-x0+dx)/dx
iy = (y-y0+dy)/dy
nsldx1 = INTF(ix-1)
nsldx2 = INTF(ix)
coord = &XAXIS(sld)
IFTHEN/coord(1)>0
nsldx1 = INTF(ix)
nsldx2 = INTF(ix+1)
ENDIF
nsldy = INTF(iy)
IFTHEN/(nsldx1<0) OR (nsldx2<0) OR (nsldy<0) OR $
(nsldx1>nx) OR (nsldx2>nx) OR (nsldy>ny)
MESSG/'Приспособление за пределами стола !'
JUMP/step5:
ENDIF
zH(nsldx1,nsldy) = coord2(3)
zH(nsldx2,nsldy) = coord2(3)
step5:
$$ --------Вывод ног-(построение геом обьектов)------
step51:
ix=1
LFOR51:
IFTHEN/ix<=nx
iy=1
LFOR52:
IFTHEN/iy<=ny
IFTHEN/zH(ix,iy)==0
JUMP/LEND5:
ENDIF
x=(ix*dx-dx)+x0
y=(iy*dy-dy)+y0
$$----Вывод ног-для приспособ 1
IFTHEN/((ix==nfixx1) AND (iy==nfixy)) OR $
((ix==nfixx2) AND (iy==nfixy))
ln1 = SOLCYL/ORIGIN,x,y,0,HEIGHT,zH(ix,iy),DIAMTR, diam1
JUMP/LEND5:
ENDIF
$$----Вывод ног-для приспособ 2 - слайдера
IFTHEN/((nsldx1==ix) AND (nsldy==iy)) OR $
((nsldx2==ix) AND (nsldy==iy))
ln2 = SOLCYL/ORIGIN,x,y,0,HEIGHT,zH(ix,iy),DIAMTR, diam1
JUMP/LEND5:
ENDIF
$$----Вывод ног-(построение геом обьектов)
HT = zH(ix,iy) - h
HT2 = zH(ix,iy) - h2
coord = -norma(ix,iy,1..3)
ln3 = SOLCYL/ORIGIN,x,y,0,HEIGHT, HT, DIAMTR, diam2
ln4 = SOLCYL/ORIGIN,x,y,0,HEIGHT, HT2,DIAMTR, diam1
ln5 = SOLCYL/ORIGIN,x,y, HT ,HEIGHT, h*dir , DIAMTR,diam,AXIS,coord
&COLOR(ln5) = &GREEN
LEND5:
iy = iy + 1
JUMP/LFOR52:
ENDIF
ix = ix + 1
JUMP/LFOR51:
ENDIF
$$ --------Вывод программы------
$$ --Нам необходимо вывести 3 программы:
$$ --1 программы - для приспособ фиксатор+слайдер ------
$$ --2 программы - для поворотных приспособ -----
$$ --3 программы - для обшивки -----
step52:
&FTYPE=&DECIM
&DDECPL=4
&DECPT=&PERIOD
&SUPRES=&NO
$$ --1 программа -- Для приспособлений
print/';'+ &PNAME
print/'DEFINE_PRG P/'+dtname+'_N0001'
ix = nfixx1
iy = nfixy
s = INTF((ix-0.5)/6)+1
r = iy
c = (ix-(INTF(ix/6))*6)
IFTHEN/c==0
c = 6
ENDIF
$$ проверка на угол в 45 градусов - присоска больше не держит
coord = norma(ix,iy,1..3)
angerr = ''
IFTHEN/ACOSF(-coord(3))>45
angerr = '; ANGLE > 45 '
ENDIF
str ='MOVE '+'S0'+ISTR(s)+'R0'+ISTR(r)+'C0'+ $
ISTR(c)+' ' + DFSTR(zH(ix,iy)) + angerr
print/str
ix = nfixx2
iy = nfixy
s = INTF((ix-0.5)/6)+1
r = iy
c = (ix-(INTF(ix/6))*6)
IFTHEN/c==0
c = 6
ENDIF
$$ проверка на угол в 45 градусов - присоска больше не держит
coord = norma(ix,iy,1..3)
angerr = ''
IFTHEN/ACOSF(-coord(3))>45
angerr = '; ANGLE > 45 '
ENDIF
str ='MOVE '+'S0'+ISTR(s)+'R0'+ISTR(r)+'C0'+ $
ISTR(c)+' ' + DFSTR(zH(ix,iy)) + angerr
print/str
ix = nsldx1
iy = nsldy
s = INTF((ix-0.5)/6)+1
r = iy
c = (ix-(INTF(ix/6))*6)
IFTHEN/c==0
c = 6
ENDIF
$$ проверка на угол в 45 градусов - присоска больше не держит
coord = norma(ix,iy,1..3)
angerr = ''
IFTHEN/ACOSF(-coord(3))>45
angerr = '; ANGLE > 45 '
ENDIF
str ='MOVE '+'S0'+ISTR(s)+'R0'+ISTR(r)+'C0'+ $
ISTR(c)+' ' + DFSTR(zH(ix,iy)) + angerr
print/str
ix = nsldx2
iy = nsldy
s = INTF((ix-0.5)/6)+1
r = iy
c = (ix-(INTF(ix/6))*6)
IFTHEN/c==0
c = 6
ENDIF
$$ проверка на угол в 45 градусов - присоска больше не держит
coord = norma(ix,iy,1..3)
angerr = ''
IFTHEN/ACOSF(-coord(3))>45
angerr = '; ANGLE > 45 '
ENDIF
str ='MOVE '+'S0'+ISTR(s)+'R0'+ISTR(r)+'C0'+ $
ISTR(c)+' ' + DFSTR(zH(ix,iy)) + angerr
print/str
print/'END_DEFINE_PRG'
print/' '
print/' '
print/' '
$$ ---- Для остальных ног ( 3 программа )
print/';'+ &PNAME
print/'DEFINE_PRG P/'+dtname+'_N0003'
$$ выводить начинаем с приоритетом по оси Х
iy=1
LFOR56:
IFTHEN/iy<=ny
ix=1
LFOR57:
IFTHEN/ix<=nx
IFTHEN/zH(ix,iy)==0
JUMP/LEND55:
ENDIF
x=(ix*dx-dx)+x0
y=(iy*dy-dy)+y0
s = INTF((ix-0.5)/6)+1
r = iy
c = (ix-(INTF(ix/6))*6)
IFTHEN/c==0
c = 6
ENDIF
$$ проверка на угол в 45 градусов - присоска больше не держит
coord = norma(ix,iy,1..3)
angerr = ''
IFTHEN/ACOSF(-coord(3))>45
angerr = '; ANGLE > 45 '
ENDIF
HT2 = zH(ix,iy) - h2
str ='MOVE '+'S0'+ISTR(s)+'R0'+ISTR(r)+'C0'+ $
ISTR(c)+' ' + DFSTR(HT2) + angerr
IFTHEN/((ix==nfixx1) AND (iy==nfixy) OR $
(ix==nfixx2) AND (iy==nfixy)) OR $
((ix==nsldx1) AND (iy==nsldy) OR $
(ix==nsldx2) AND (iy==nsldy))
$$ print/'; fixture = ',ix, iy
ELSE
print/str
ENDIF
LEND55:
ix = ix + 1
JUMP/LFOR57:
ENDIF
iy = iy + 1
JUMP/LFOR56:
ENDIF
print/'END_DEFINE_PRG'
$$----Удаление ENT и возврат исхд значений-------
ret:
&WCS = wcs_sv
DELETE/wcs_sv
$$----Конец программы-----------
halt:
HALT
Вместо того, чтобы просто выводить в листинг
результаты своей работы. Вы можете выводить их в файл, а потом
выкинуть в листинг, примерно как показано ниже:
/* This is the GRIP which prints a text file to the listing window */
NUMBER/ orig_ldev
STRING/ file_name (132)
orig_ldev = &LDEV
&LDEV = &CRT
FETCH/ TXT, 10, file_name
FPRINT/ 10
FTERM/ TXT, 10
&LDEV = orig_ldev
HALT
|
|
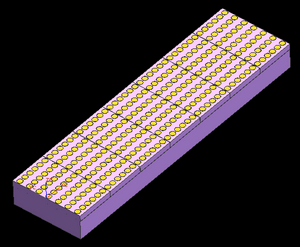
Первая программа - строила стол :):):): я не
хател тянуть сборку. так как задачу пересечений надо было решать в
едином поле имен. Хотя допустил работу сборки..((
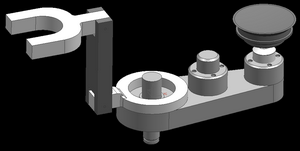
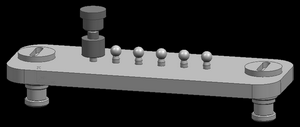
2-ая, 3-я программа - устанавливали приспособы и формировали программы
для выдвижения ног для их поддержки.
4-я - формировала программы для обшивки
5-ая была включена в ядро постпроцессора для проверки самопересечений
фрезы и ног.
POPEN
M70
DPRNT [ BEGPOGOS ]
DPRNT
DUCK Sxx Ryy Czz
UNDUCK Sxx Ryy Czz
DPRNT [ ENDPOGOS ]
M70
PCLOS
S = 1..7
R= 1..7
C= 1..6
|
 Ну.... Во
Ну.... Во